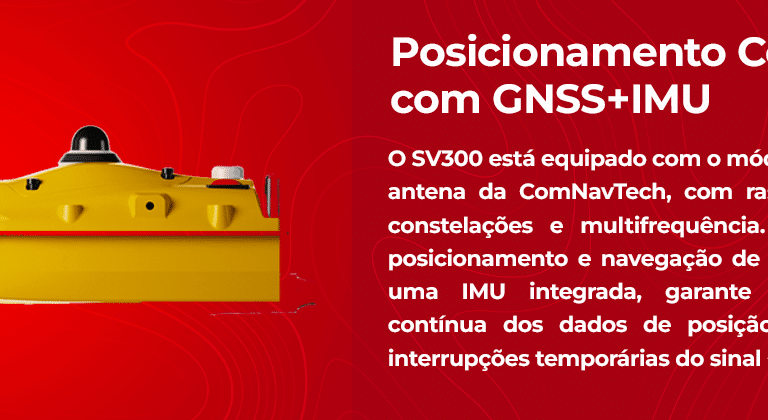
O SV300 é um Veículo de Superfície Não Tripulado (USV) que adota um design de controlo principal altamente integrado, contando com um sistema de posicionamento GNSS de alta precisão incorporado, ecobatímetro e software de controlo da embarcação, simplificando as suas operações de levantamento.
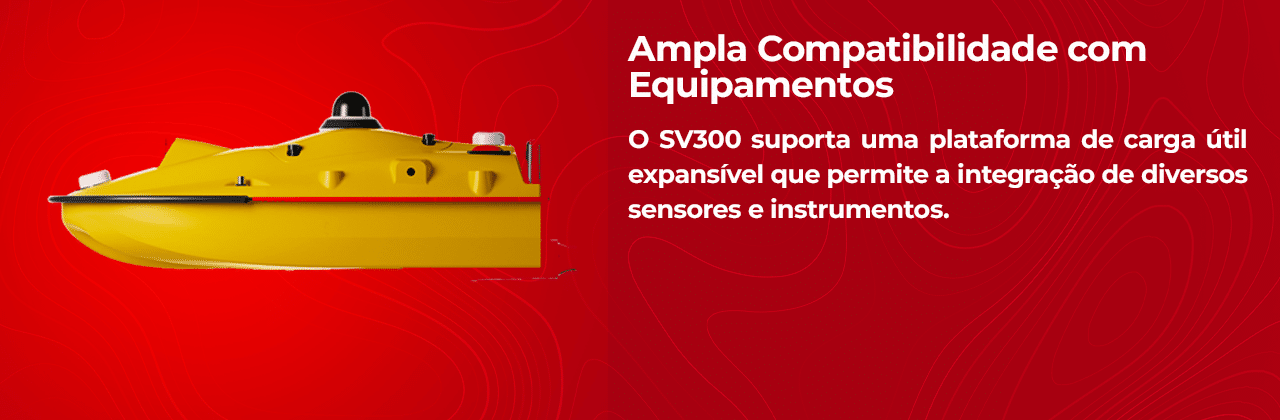
Equipado com um sistema inteligente de controlo, oferece um elevado nível de automação, forte resistência a perturbações e uma excelente capacidade de expansão do casco. Pode ser equipado com ecobatímetros, sonar de varrimento lateral (side-scan sonar), sensores de qualidade da água e outros instrumentos, permitindo a recolha, processamento e análise automática, eficiente e precisa de topografia subaquática, parâmetros de qualidade da água e dados específicos de alvos.
- Antena GNSS integrada;
- Sistema de radar para desvio de obstáculos;
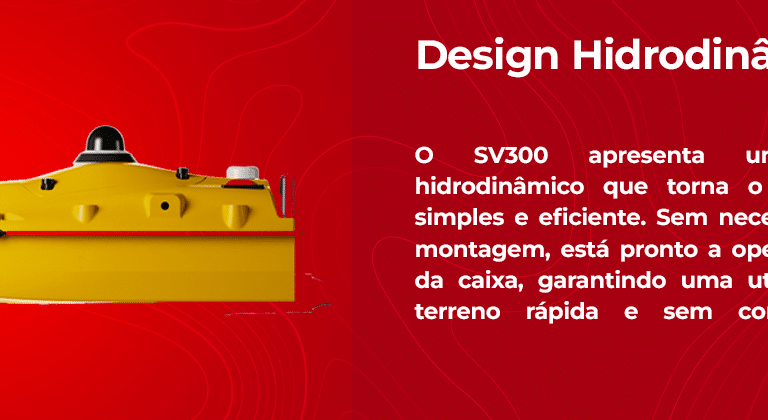
- Instalação rápida;
- Proteção IP67 contra água e poeira;
- Hélice de alta velocidade com longa vida útil;
- Medição automática de perfis transversais e linhas;
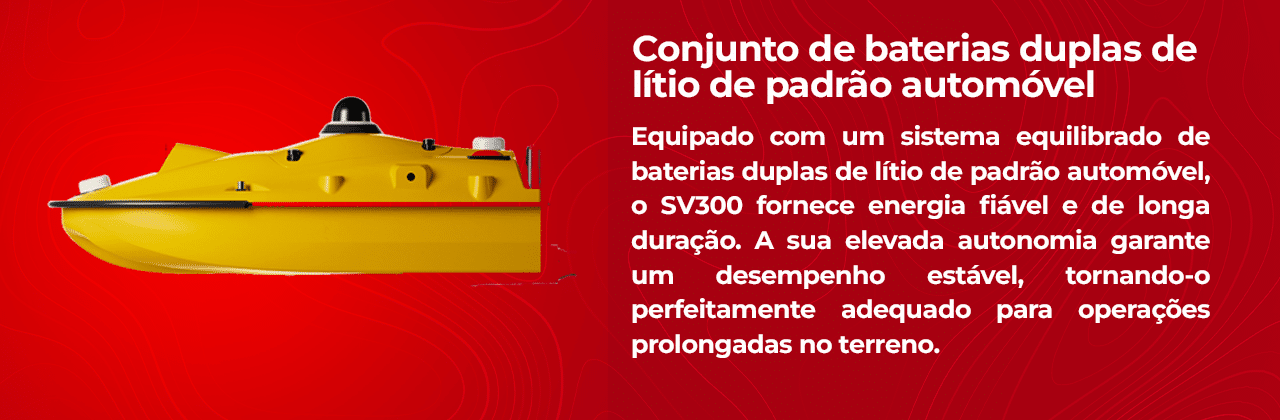
- Estado da bateria da embarcação;
- Design de controlo mestre integrado.